���ӡ��ǽ��|ʽ�ĽY����3D���輼�g
�S���ܶ�ȫ�¼��g��ӿ�F���˂�Խ��Խ��Ҫ��3D��������ʾ�F�������е����w���e�ǙC��ҕ�X�͙C���˼��g�������������ھ��_�����m����3D�����ܡ�����ᘌ�3D����đ��ð��������R�e�����������I�z�顢�|�����ơ��t�������ƺ�ԭ���OӋ��
3D��������ȡһ�����w�ı��������y�������Ô��ֵķ�ʽ�����ʾ�������@Щ�������ɼ���һ����X��Y��Z���ˣ���ʾ���w�ⲿ���棩�M�ɵ��c�ơ�����һ��3D�����ķ������Դ_�����������w�ı���e���w�e�������Π���κ������ߴ硣
һ��3D����x��Ҫһ��̽ᘁ��_�������w������ÿһ���c�ľ��x����Փ�ϣ��@��̽ᘿ�����һ���|�X���������|��̽ᘡ�Ȼ�����ܶ�������Ҫ�ǽ��|ʽ�y����ֻʹ�ù��Ձ�̽�y���dȤ���w�Ĺ�W���g�����ᘌ��@�����}�Ľ�Q����������һ���������ٲ���2���z���^���ṩ���w��ҕ�X���g��������Ӌ���Ҫ��ͨ�����^�����Ҍ��ڭh�����l�������С�����һ���������ýY�������D�Σ���ֻ��һ��ͶӰ�x���������ɹ�D�Σ��Լ�һ���Δz���^��Ӌ�������еȵ��㷨��
�Y����
�Y������3D�����һ����W��������Ͷ���һ�M�Ô��W��������Ĺ�D�Σ�����һ������������y�������w��һ����ͶӰ�x�ľ��x��֪�Ĕz���^ͬ����һ�M���������w�ĈD������������У�ʵ�ƽ����ʱ��棬�z���^�����ĈD�α����������w�ı����Π���Ť�����������ʷֵ�ԭ��ʹ��Ӌ�㱻�������w������ÿ���c��XYZ���˳ɞ���ܣ�Ҋ�D01����Ȼ�@�õ��c�Ɣ������ڱ��������w����Ԕ��3Dģ�͵�Ӌ�㘋�졣
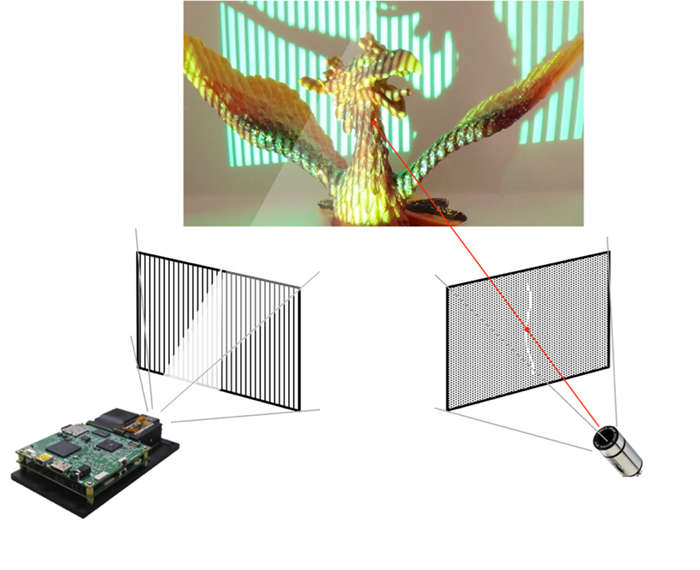
�D01��ʹ��DLP® ���g�ĽY����
(؟�ξ���admin)
 �{���w�SͿ�ӹܠ�֧�ܹ���
�{���w�SͿ�ӹܠ�֧�ܹ��� ���������Fꠡ�Science��
���������Fꠡ�Science��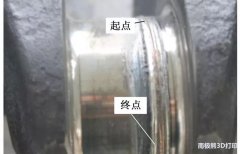 ��ȼ�C�����������ޏͼ��g
��ȼ�C�����������ޏͼ��g �����ܽ��ټ������������b
�����ܽ��ټ������������b ���������c�����W������
���������c�����W������ ���漼�g�c3D��ӡ�Ƅ�Һ��
���漼�g�c3D��ӡ�Ƅ�Һ��- ���{���w�SͿ�ӹܠ�֧�ܹ�����������3D��
- �����������Fꠡ�Science���ӿ��� 3D��ӡ
- ����ȼ�C�����������ޏͼ��g�C��
- �������ܽ��ټ������������b�估��ˇ�_�l
- �����������c�����W�����аlˮ���z/��
- �����漼�g�c3D��ӡ�Ƅ�Һ��Ԫ����������
- ���ƌW��ʹ�ó�������������3D��ӡ�M��
- ���P��DMD�����۸�3D��ӡ���g�ķ���ģ�M
- ���������x�^������Y�ļ{�������ۺ����
- �����صۇ������WԺ���ͳɱ�늻��W�����
 �ƌW��ʹ�ó���
�ƌW��ʹ�ó���- ��CLIP�B�mҺ�����켼�g����ԵĹ�̻�
- ���{��3D��ӡ���������p���Ӿۺϼ��g�I
- ���P�c2016�ϰ���Ŵ���3D��ӡ���g
- ��3Dģ�͎�Sketchfab�Ƴ�ʹ��VR�^���g�[3
- �������{��Ӣ�Z����3D�����ӡѪ�ܼ��g
- �����g���£���IFAM�_�l����FDM 3D��ӡ
- �����ͽ���3D��ӡ���gXJET���������
- ���{���w�SͿ�ӹܠ�֧�ܹ�����������3D��
- �������c����3D��ӡ���g�о��c����
- ��SLM 3D��ӡ���g��ͻ�ƣ������a�ߏ�����


